在人類(lèi)實(shí)現(xiàn)載人登月50周年之際,中國(guó)科學(xué)院國(guó)家天文臺(tái)副臺(tái)長(zhǎng)李春來(lái)研究員在頂級(jí)學(xué)術(shù)期刊《科學(xué)》發(fā)表文章�,闡述中國(guó)探月工程的現(xiàn)狀與未來(lái)�。他表示���,中國(guó)探月工程“繞���、落����、回”順利推進(jìn),嫦娥工程將從技術(shù)驗(yàn)證逐漸走向技術(shù)任務(wù)��,規(guī)劃將在2030年前開(kāi)展“勘���、建�、用”任務(wù)�,通過(guò)三次探月任務(wù)建成具備科學(xué)探測(cè)、科研試驗(yàn)和資源利用技術(shù)驗(yàn)證的綜合功能月球機(jī)器人科研站����?;诙喾N因素考慮,機(jī)器人探測(cè)將成為中國(guó)后續(xù)月球探測(cè)任務(wù)的首要發(fā)展方向����,當(dāng)未來(lái)?xiàng)l件成熟將向載人探測(cè)方向發(fā)展,最終實(shí)現(xiàn)可容納人類(lèi)宇航員長(zhǎng)期駐留的月球基地����。\大公報(bào)記者 劉凝哲報(bào)道
李春來(lái)在《科學(xué)》上發(fā)表的文章���,著重闡述中國(guó)探月工程啟動(dòng)15年來(lái)、已實(shí)施四次月球探測(cè)任務(wù)所取得的成就�,規(guī)劃中四次探測(cè)任務(wù)的技術(shù)和科學(xué)目標(biāo),以及嫦娥任務(wù)之外的長(zhǎng)期目標(biāo)和規(guī)劃����。
嫦五年底采樣 或揭月球“身世”
中國(guó)探月工程即將實(shí)施取樣返回任務(wù)。文章指出�,2019年年底,中國(guó)將實(shí)施嫦娥五號(hào)任務(wù)�,在月球風(fēng)暴洋北部,呂姆克穹隆附近的預(yù)選著陸區(qū)實(shí)現(xiàn)采樣返回��,很有可能獲取的火山作用相關(guān)巖石或者年輕的月海玄武巖��,將對(duì)月球地層定年�、火山活動(dòng)及熱力學(xué)演化等科學(xué)問(wèn)題開(kāi)展研究。
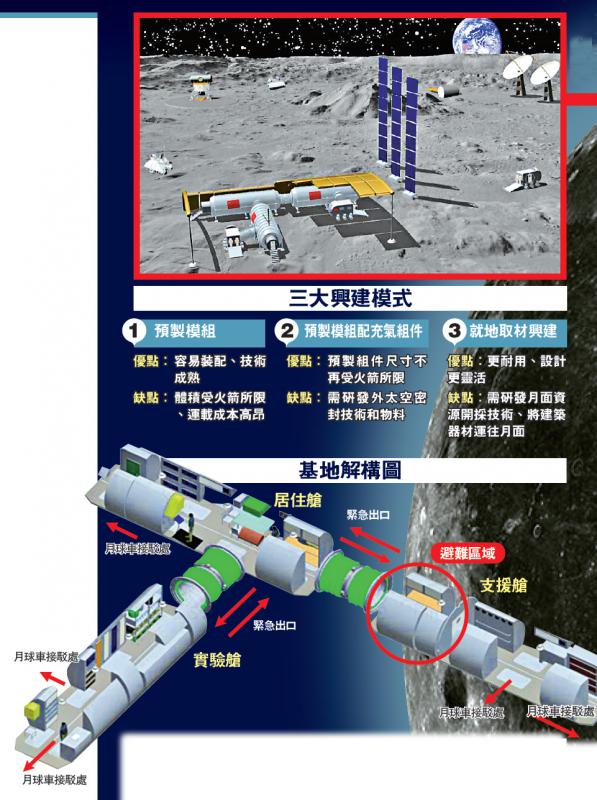
嫦娥工程“繞�、落、回”三期任務(wù)的啟動(dòng)與實(shí)施之后���,中國(guó)提出了2030年前將開(kāi)展“勘���、建��、用”的后續(xù)任務(wù)規(guī)劃��。包括“勘”����,勘察月球環(huán)境和資源����;“建”,建立長(zhǎng)期基礎(chǔ)科研平臺(tái)�;“用”,開(kāi)采可利用資源技術(shù)驗(yàn)證����。
文章透露了上述任務(wù)的初步規(guī)劃:2030年前在月球南極地區(qū)開(kāi)展嫦娥六號(hào)月球樣品自動(dòng)采樣返回,嫦娥七號(hào)月球極區(qū)環(huán)境與資源綜合勘查��、嫦娥八號(hào)驗(yàn)證月面“3D打印”房子等關(guān)鍵技術(shù)等三次任務(wù)�,建成具備科學(xué)探測(cè)��、科研試驗(yàn)和資源利用技術(shù)驗(yàn)證的綜合功能月球機(jī)器人科研站�,完成月球資源開(kāi)采和利用、生物再生生命保障等技術(shù)驗(yàn)證�,從空間技術(shù)發(fā)展為主逐漸過(guò)渡到空間科學(xué)和空間應(yīng)用并重�。
攻堅(jiān)科研站技術(shù) 奠基載人探月
文章指出����,2030年后,中國(guó)后續(xù)月球探測(cè)將繼續(xù)朝著機(jī)器人探測(cè)和載人探測(cè)兩個(gè)方向發(fā)展�。出于技術(shù)跨度、火箭選型����、經(jīng)濟(jì)可承受性、效費(fèi)比等方面因素考慮����,機(jī)器人探測(cè)將成為后續(xù)月球探測(cè)任務(wù)的首要發(fā)展方向,通過(guò)深化月球科學(xué)探測(cè)并驗(yàn)證資源開(kāi)發(fā)與利用��、生物再生生命保障等技術(shù)����,最終實(shí)現(xiàn)機(jī)器人長(zhǎng)期駐留工作、短期可容納宇航員造訪(fǎng)的月球基地��。
未來(lái)的探月任務(wù)����,將給航天等科學(xué)技術(shù)帶來(lái)挑戰(zhàn)����。李春來(lái)指出��,為完成這些任務(wù)���,需要攻克月面高精度定點(diǎn)著陸�、陰影坑飛躍探測(cè)��、適應(yīng)極區(qū)惡劣環(huán)境的智能機(jī)器人����、大承載著陸、智能機(jī)器人協(xié)同操作���、月球科研站指揮中樞綜合控制�、稀有氣體分離提取等月球科研站關(guān)鍵技術(shù)��。同時(shí)�,建成月球科研站基本型,開(kāi)展有應(yīng)用前景的資源開(kāi)發(fā)與利用技術(shù)驗(yàn)證�,提升月球科學(xué)與資源應(yīng)用能力����,為未來(lái)建設(shè)運(yùn)營(yíng)月球科研站��,及載人探月奠定基礎(chǔ)���。





 京公網(wǎng)安備11010502037337號(hào)
京公網(wǎng)安備11010502037337號(hào)